2. Графический метод построения интегральных кривых (метод изоклин). Дифференциальное уравнение y'= f(x, у) в плоскости с фиксированной декартовой прямоугольной системой координат Оху определяет поле направлений равенством tg a = f (x, y)
|
Изоклиной
уравнения (поля направлений) называется всякая кривая, определяемая
f
(x,
y)
=k уравнением при фиксированном
k. Для
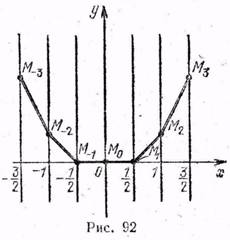
приближенного (графического) решения уравнения у' = f (x, у) построим на плоскости изоклини для нескольких значений k Пусть М0
(х0 , y0 ) — некоторая начальная точка. Изоклина L0, проходящая через эту точку,, соответствует значению k, равному k0 = (х0
, y0
). Проведем отрезок М0М1 c угловым коэффициентом
k0 до пересечения в
точке M1 ближайшей изоклиной L1 (тем самым мы заменим дугу интегральной кривой отрезком ее
касательной). Далее, из точки m1
(x1, y1) проведем новый отрезок М1М2 с
угловым коэффициентом k1 = f(x1, y1) до пересеченна в точке
М2 со следующей изоклиной L2 и т. д.
В результате такого построения мы получим ломаную, являющуюся приближенным
изображением интегральной кривой, проходящей через начальною точку
М0 Чем гуще взята сеть
изоклин, тем более точно можно получить интегральную кривую.
Изменяя положение начальной точки М0,
аналогично можно построить приближенно и другие интегральные кривые. |
 |
3. Физический смысл нормальной системы. Для простоты ограничимся рассмотрением системы двух дифференциальных
уравнений, причем будем считать, что независимая переменная t есть время:
 |
(11) |
Решение
x = j(t) y = ψ(t) этой системы есть
некоторая кривая в плоскости Оху с фиксированной
декартовой прямоугольной системой координат. Плоскость Оху
называется фазовой плоскостью, а кривая x = j(t) y = ψ(t)
— фазовой траекторией системы
(11).
Сама
система (11) называется динамической
системой. Динамическая система называется автономной (стационарной),
если в правые части равнений этой системы время t не входит явным образом
Динамическая система определяет поле скоростей движущейся
в плоскости точки в любой момент времени t.
Решение динамической системы x = x(t), y = y(t) — это уравнения движения точки: они определяют положение движущейся
точки в любой момент времени t.
Начальные условия задают положение точки
в начальный момент: х(t0) = x0, y(t0)=y0. Уравнения движения определяют также
и траекторию движения, будучи уравнениями этой кривой
в параметрической форме.